

















 12 / 72
12 / 72

12
la revista Comforp
ENERO-MARZO 2016
I
I
LOS ALUMNOS
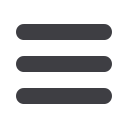
Producción de calor
Para la producción de calor los ve-
hículos industriales constan de un ra-
diador detrás del salpicadero por el
que circula el líquido refrigerante del
motor, en un sistema climatizado el
radiador de calefacción está a conti-
nuación del evaporador y una chapa-
letas direccionaran el aire proceden-
te del exterior hacia el radiador de
calefacción, en caso de querer más
temperatura en el interior del habi-
táculo que en el exterior. Este aire
que sale de los aireadores siempre
que el climatizador esté conectado
(en auto) saldrá caliente pero libre
de humedad fundamental para el
desempañado del vehículo.
Can-bus
Nos parece necesario incluir en
este trabajo un apartado dedicado
a CAN pues el sistema de climatiza-
ción de los vehículos industriales es-
tán presentes varias unidades como
la unidad de climatización, unidad
de calefacción unidad gestión motor,
ect y todas intercambian información
por un bus de datos, de forma que
se pueden intercambiar sensores sin
la necesidad de la duplicación de los
mismos.
Introducción
En la actualidad, prácticamente to-
dos los sistemas del vehículo se con-
trolan de forma electrónica, lo cual
tiene una serie de ventajas:
El gran problema de la electrónica
aplicada al automóvil es la necesidad
de utilizar más cables y conectores.
Esto hizo que los valores de peso y
complejidad se disparan de forma
acelerada. Entonces los ingenieros
tuvieron que empezar a buscar for-
mas de simplificar los sistemas, nació
el sistema multiplexado CAN-BUS.
Antes de la introducción de los
sistemas digitales las unidades eran
independientes, cada unidad recibía
información de sus propios sensores
y accionaba sus actuadotes. Esta so-
lución se hizo cada vez más proble-
mática, puesto que los sensores se
duplicaban, a pesar de que varios sis-
temas necesitaban la misma informa-
ción. La solución a este problema era
hacer que las unidades se comunica-
ran entre si a tiempo real, compar-
tiendo así la información de los sen-
sores para una mayor simplificación
de los sistemas del vehículo.
Este tipo de sistema se denomina
CAN-BUS y consiste en una serie de
unidades conectadas entre sí me-
diante los buses (parte física del sis-
tema), que son las líneas de interco-
nexión entre las unidades de control.
Funcionamiento
La comunicación entre las unidades
es de tipo digital, conjuntos de unos y
ceros (conexión y desconexión), que
las unidades interpretan y utilizan
para comunicarse con otras unidades
y saber cuando tienen que accionar
sus actuadotes. Esta señal formada
por unos y ceros se denomina señal
cuadrada como se observamos en el
osciloscopio tiene esta forma:
Los buses de datos están normal-
mente constituidos por dos líneas,
pero en algunos vehículos industria-
les constan de cuatro líneas. Según
el modelo, dos siempre son CAN-L y
CAN-H de información, las otras dos
pueden ser dos líneas adicionales
que proporcionan protección adicio-
nal contra interferencias (apantalla-
mientos conectados a masa) o bien
servir de polo positivo y negativo a
las unidades a las que están conecta-
das, funcionando como alimentación
y masa.
Una de las grandes ventajas del
sistema CAN es el ahorro de cables
y sensores debido a que todas las
unidades están interconectadas para
poder compartir la información.
Después de que la información sea
compartida cada unidad aprovecha
o se deshace de la información de-
pendiendo de la relevancia y validez
del mismo para cada una de ellas.
Además, si varias unidades intentan
transmitir un mensaje esta transmi-
sión no se produce hasta que la línea
de bus esté libre. Por este motivo los
mensajes deben ser transmitidos en
función de la prioridad de cada uno.
Para evitar interferencias en las se-
ñales estas se envían por duplicado
(una por cada cable del bus de datos).
Pero la peculiaridad es que estas se-
ñales van invertidas, de esta forma,
la unidad, durante el procesamiento,
sólo ha de comprobar la diferencia
entre las tensiones de cada señal e
interpretarlas. Además los cables van
trenzados para que en caso de una
interferencia, esta afecte a las dos
líneas por igual asegurando que la di-
ferencia de tensiones sea la correc-
ta. Esto es lo que se denomina CAN
HIGH y CAN LOW.
Otra medida de seguridad son las
resistencias de terminación que, co-
locadas al final de los buses, evitan
la aparición de reflexiones de señal
siempre presentes en líneas de alta
frecuencia, y que pueden producir
interferencias.
Versiones de bus de datos
Las redes que controlan sistemas
como el cierre centraliza, la clima-
tización, los elevalunas,…, no ne-
cesitan una transmisión de datos
tan rápida como las que transmiten
la información sobre el motor o los
frenos. Por ello tanto en los turismos
como en los camiones se emplean
distintos tipos de CAN (de alta y de
baja velocidad) que emplean distin-
tas velocidades de transmisión. La
línea CAN de alta velocidad transmi-
te la información a una velocidad de
500 Kb/s y el de baja a 125 Kb/s.